I am curious about how the Rasterization function calculates the population of points within each grid cell. I have rasterized a dense point cloud with several methods with different results.
I am implementing some cell-by-cell statistics on rasters produced from point clouds. The cell populations will be consequential and I want to be clear about what interpolations I am making.
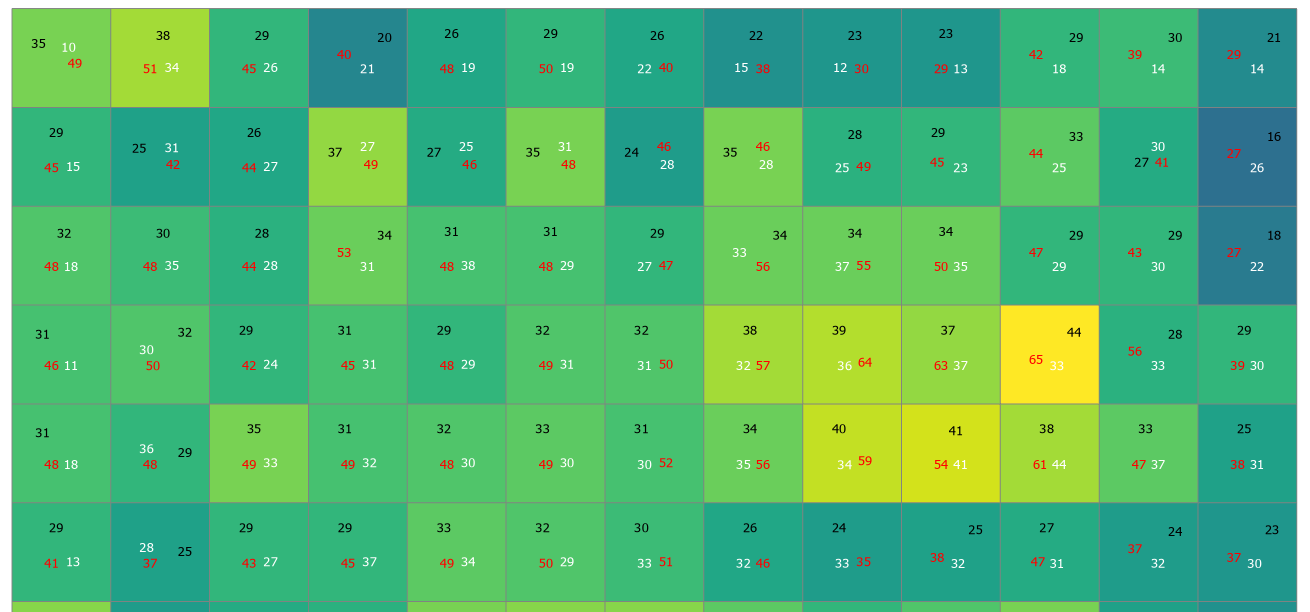
Here is an example of my rasterized results. The numbers are the amount of points falling within each aligned grid cell using:
- ArcGIS in black
- Cloud Compare in white
- PDAL's 'writers.GDAL' in red (using search radius = grid resolution * sqrt(2) / 2)
This is just an example. There are some edge effects occurring and the search radius I am using in PDAL is certainly sampling points outside each grid cell.
Reading about the gridding method used in PDAL made me curious about how rasterization is done in CloudCompare.
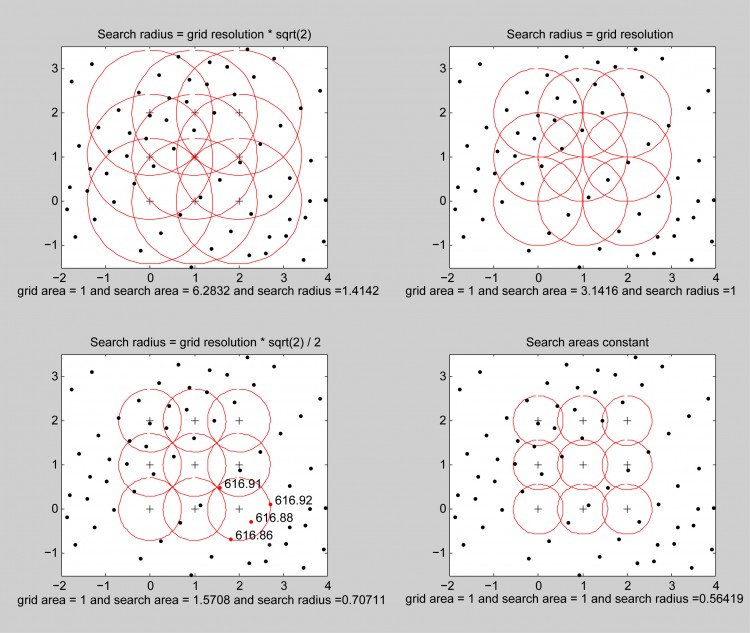
The PDAL gdal writer takes a search radius input and the effect of the search radius can be visualized here. from https://opentopography.org/otsoftware/points2grid
Does CloudCompare's rasterization consider points truly using a square grid, or is there a spherical search area imposed on a grid as above?
Thanks!